Сравниваем промышленные камеры DJI Zenmuse L2 и DJI Zenmuse L1 – Часть 1
В этой статье мы предлагаем вам достаточно подробное сравнение между двумя промышленными камерами серии Zenmuse: новой L2 и ее предшественницы L1. Производитель – компания DJI – заявила, что ее новое детище получило больше возможностей и функций для профессиональной съемки и сканирования, особенно при использовании вместе с приложением DJI Terra. Чтобы наглядно это продемонстрировать, мы дополним сравнение технических характеристик двух продуктов различными данными, собранными с помощью двух камер в ходе нескольких тестовых полетов.
Кратко об основных преимуществах Zenmuse L2 перед L1:
- Камера L2 показывать больше возможностей по обнаружению мелких деталей, например, силовых кабелей и других элементов ЛЭП при исследовании сложных объектов;
- Как показали летные испытания при полете на высоте 50 метров абсолютное вертикальное отклонение L2 достигает 44 мм, а у L1 целых 52 мм;
- Если у L1 инерциальный модуль придется готовить к полету в течение примерно 5 – 10 минут, то у L2 инерциальный модуль не требует этого, он всегда готов к работе;
- У RGB-камеры системы L2 установлена матрица большего размера по сравнению с тем же компонентом системы L1; новая камера дает более высокий коэффициент выборки, делает больше отражений и обладает возможностью собирать данные в полете на более высокой скорости и большей высоте.
И в целом, по сравнению с предшественницей DJI Zenmuse L2 обеспечивает более высокую точность, большую производительность и создает более плотное облако точек.
Два фото ниже показывают одинаковые объекты ЛЭП. При этом один снимок сделан камерой L2, а второй – L1. Фото демонстрирует более широкие возможности L2 в плане обнаружения мелких объектов в съемочной зоне. Сами электрические провода отображены более детально, чем на фото, созданным L1.
И отчет о точности показывает, что при полете на высоте 50 метров L2 может достигать абсолютного вертикального отклонения в 43 мм, в то время как ее предшественница L1 показывает 52 мм.
Ниже мы рассмотрим важнейшие обновления в L2 и покажем, как с их помощью можно повысить производительность рабочего процесса по сравнению с L1.
L2 и L1: основные характеристики беглым взглядом
Прежде чем мы углубимся в наборы данных, давайте посмотрим на основные характеристики L2 и L1 в сравнительной таблице.
L2 | L1 | |
| Размеры | 155 x 128 x 176 мм | 152 x 110 x 169 мм |
| Вес | 905±5 г | 930±10 г |
| Мощность | 28 Вт (обычная) 58 Вт (макс.) | 30 Вт (обычная) 60 Вт (макс.) |
| Класс защиты | IP54 | IP54 |
| Совместимые дроны | M300 RTK (нужен пульт DJI RC Plus); M350 RTK | M300 RTK; M350 RTK |
| Производительность системы | Рабочая область при одном полете может достигать 2,5 кв. км. Относительная высота: 150 м; Полетная скорость: 15 м/сек. | Рабочая область при одном полете может достигать 2 кв. км. Относительная высота: 100 м; Полетная скорость: 13 м/сек. |
| Диапазон обнаружения | 450 м при коэффициенте отражения 50%, 0 клк; 250 м при коэффициенте отражения 10%, 100 клк | 450 м при коэффициенте отражения 80%, 0 клк; 190 м при коэффициенте отражения 10%, 100 клк |
| Скорость формирования облака точек | Одно отражение: макс. 240000 точек/сек; Несколько отражений: макс. 1200000 точек/сек | Одно отражение: макс. 240000 точек/сек; Несколько отражений: макс. 480000 точек/сек |
| Точность системы (заявленная в характеристиках DJI) | По горизонтали: 5 см при 150 м; По вертикали: 4 см при 150 м. В обоих вариантах полетная высота 150 м, полетная скорость 15 м/сек | По горизонтали: 10 см при 50 м; По вертикали: 5 см при 50 м. В обоих вариантах полетная высота 50 м полетная скорость 10 м/сек. |
| Модуль LiDAR: Точность на дистанции | 2 см при 150 м | 3 см при 100 м |
| Точность инерциального модуля навигации | Точность рыскания: в реальном времени 0.2°, при пост-обработке, 0.05°; Точность крена/поворота: в реальном времени 0.05°, при пост-обработке 0.025° | Точность рыскания: в реальном времени 0.3°, при пост-обработке 0.15°; Точность крена/поворота: в реальном времени 0.05°, при пост-обработке 0.025° |
| Цветовые режимы облака точек | Отражаемость, высота, расстояние, RGB | Отражаемость, высота, расстояние, RGB |
| LiDAR: макс. кол-во поддерживаемых отражений | 5 | 3 |
| LIDAR: макс. частота сбора данных | 240 кГц для всех режимов, включая Penta | 240 кГц (режим одинарного/двойного эхо); 160 кГц (режим ройного эхо) |
| LiDAR: режимы сканирования (включая FOV) | Паттерн повторяемого сканирования: 70° x 3°; Паттерн неповторяемого сканирования: 70° x 75° | Паттерн повторяемого сканирования: 70.4° x 4.5°; Паттерн неповторяемого сканирования: 70.4° x 77.2 |
| RGB-камера для картографии: размер матрицы и эффективные пиксели | 4/3 дюймов; 20 Мп; 0.7 сек. интервальной съемки | 1 дюйм; 20 Мп; 2 сек. (минимум) интервальной съемки |
| RGB-камера для картографии: скорость затвора | Механический затвор: 2-1/2000 сек; Электронный затвор: 2-1/8000 сек | Механический затвор: 1/2000 – 8 сек; Электронный затвор: 1/8000 – 8 сек |
| RGB-камера для картографии: Разрешение видео | 4K @ 30fps | 4K @ 30fps |
| Рекомендуемая полетная скорость сбора данных | 15 м/сек | От 8 м/сек до 13 м/сек |
| Необходимость предполетной подготовки инерциального модуля высокой точности | Нет | Да: 5-10 минут |
| Просмотр облака точек в реальном режиме времени | Поддерживается, оптимизация рендеринга облака точек | Поддерживается |
Как видим, обе промышленные камеры L1 и L2 оборудованы модулем LiDAR, RGB-камерой для фотограмметрии и колоризации облака точек, а также оба устройства имеют встроенный инерциальный модуль высокой точности.
Однако система L2 была представлена потребителям только 10 октября 2023 года, а ее предшественница L1 – еще в 2020 году. Поэтому нет ничего удивительного в том, что DJI внесла множество изменений и обновлений во вторую версию своей гибридной камеры серии L. Среди новшеств следует отметить следующие:
- Увеличена скорость отражения и скорость сбора данных, в том числе путем повышения глубины проникновения L2 и ее способности определять мелкие детали.
- Повышена производительность и эффективность эксплуатации за счет возможности использовать камеру на более длинных полетных маршрутах и на большей высоте, а также за счет того, что теперь инерциальный модуль L2 не требует предполетной подготовки в течение 5-10 минут, как это было с камерой L1.
- У LiDAR L2 теперь более сконцентрированный лазерный пучок: лазерное пятно L2 имеет размеры 4 x 12 см на расстоянии 100 метров, что составляет одну пятую размера лазерного пятна L1. Пучок меньших размеров и большей концентрации способен создавать более плотное облако точек.
- Диапазон измерения L2 увеличился на 30%. Типичная рабочая высота может достигать 150 метров, увеличилась и дистанция обнаружения.
- RGB-камера для точной картографии получила матрицу больших размеров с более быстрым интервалом съемки.
- Улучшен коэффициент обнаружения: новая камера способна обнаруживать объекты с коэффициентом отражения 50%, тогда как L1 может обнаружить объекты с как минимум 80-процентным коэффициентом и на расстоянии от 450 метров.
- В новой камере повышена точность инерциальной навигационной системы, а интервал ручной калибровки инерциальной навигации на маршруте увеличен на 67%.
За счет обновлений и улучшений функционала при работе в одинаковых условиях окружающей среды:
- Плотность наземных точек L2 выше в три раза по сравнению с L1.
- Толщина облака точек L2 составляет 1/3 толщины облака точек у L1.
Тестирование на участке виадука Колн-Вэлли
Возможности и преимущества новой L2 были показаны в ходе тестовых съемок на участке строящегося с мая 2022 года виадука Колн-Вэлли в Великобритании. Это место примечательно тем, что здесь находится природный заповедник. И чтобы проложить трассу высокоскоростной железной дороги из Лондона в северные графства Великобритании, было принято решение построить самый длинный железнодорожный мост и тем самым предотвратить гибель природного парка.

Тестовые полеты проводились вдоль реки Колн. Для выполнения тестовых задач использовались: промышленный квадрокоптер DJI Matrice 350 RTK, камеры DJI Zenmuse L1 и L2. Объектами исследования выступали:
- Зоны плотной растительности и места, где требовалось точно определить уровни грунта.
- Здания, городской ландшафт, где можно встретить много мелких деталей, которые также нужно исследовать.
- Количественная съемка, особенно там, где материал или грунт имеют высокие отражающие характеристики.
В итоге так получилось, что выбранное для тестов место оказалось оптимальным. Здесь была растительность, линии электропередач и склады. Все это стало хорошей испытательной площадкой для LiDAR. Изображение участка и его границы, показанные ниже, было выполнено с помощью двухмерной ортомозаики с помощью RGB-камеры системы L2.

Для полетов были заданы следующие параметры:
| Характеристика | L2 | L1 |
| Перекрытие | 50% | 50% |
| Скорость | 8m/s | 8m/s |
| Высота | 100m | 100m |
| Макс. кол-во отражений | 5 | 3 |
| Частота сбора данных | 240 кГц | 160 кГц |
| Оптимизация высоты | Да | Да |
| Тип сканирования | Повторяемое | Повторяемое |
| Калибровка IMU | Да | Да |
| Тип миссии | 2D Nadir | 2D Nadir |
| Полетная высота | 100 метров | 100 метров |
| Кол-во фото | 334 | 325 |
| Наземные контрольные точки | 2,69 см | 2,73 см |
| Время миссии | 24 мин. 27 сек Полетное время: 24 мин. 27 сек. Предполетная подготовка IMU: Не требуется | 32 мин. 50 сек Полетное время: 22 мин. 50 сек Предполетная подготовка IMU: 10 минут |
Параметры были идентичными, за исключением использования увеличенной скорости возврата и частоты дискретизации L2.
Стоит отметить, что для повышения эффективности L2 может получать данные на полетной скорости до 15 м/с. Но в ходе теста поддерживалась скорость 8 м/с. Рекомендуемые параметры полетной скорости для L1 варьируются от 8 до 13 м/с, в зависимости от задач. Вылеты проводились на высоте полета 100 метров. Высота была ограничена близостью аэродрома.
Система L1 находилась в полете 22 минуты 50 секунд, а L2 немного дольше – 24 минуты 27 секунд, но это объясняется тем фактом, что миссия выполнялась с использованием 5-кратного отражения. В целом же весь тест с L2, включая полет, оказался короче, потому что не нужно было готовить к полету инерциальный модуль этой камеры. И на этом тестировщики сэкономили время.
Инспекция ЛЭП
При проверке ЛЭП, как показала практика, особенно эффективным становится применение LiDAR. Можно отметить следующие преимущества этого метода проверки:
- быстрое срабатывание лазерных импульсов,
- способность выполнять несколько отражений одним лазерным импульсом, чтобы обеспечить более высокое пространственное разрешение.
В целом LiDAR помогает получить более подробную информацию о сложных конструкциях, какими являются ЛЭП. Речь идет не только об их конструктивных элементах, но и о форме, ориентации, также множестве мелких деталей.
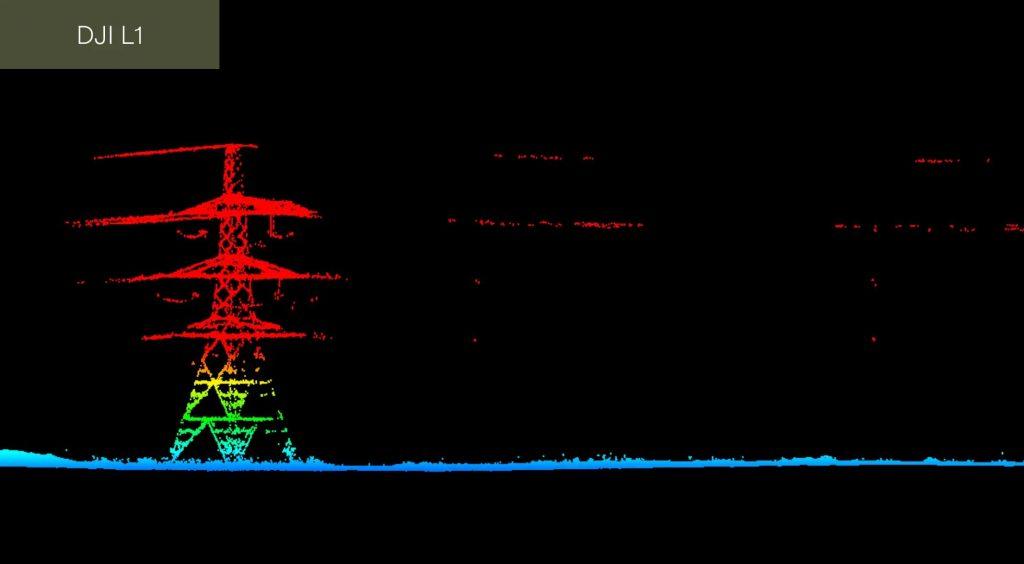
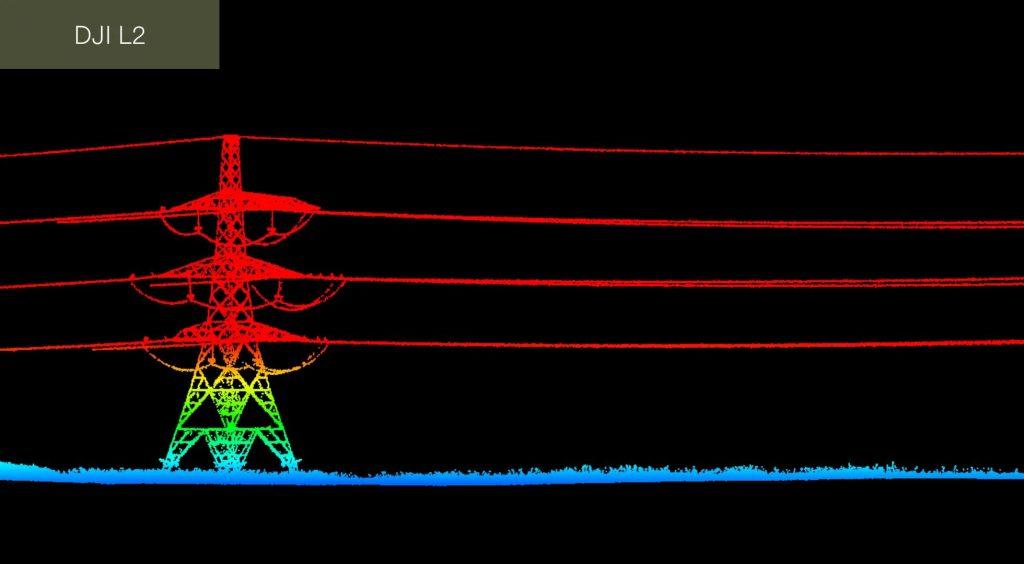
На изображении ниже показано отображение линий электропередачи L2 на тестируемом участке.

При внимательном изучении и сравнении результатов, полученных L2 и L1, становится ясно, что система L2 лучше справилась с обнаружением кабелей и передающих вышек на местах. Это хорошо видно по двум снимкам, сделанные с помощью DJI Terra.

Также можно заметить намного более высокий уровень детализации данных у L2, если проанализировать вид сверху вниз с использованием изображений Terrasolid. Обратите внимание, что линии электропередачи отображены более полно в данных с L2, но почти отсутствуют в данных с L1.

Terrasolid — это дополнительное программное обеспечение для DJI Terra. Исходные данные были обработаны в DJI Terra, а затем перенесены в Terrasolid для дальнейших манипуляций и анализа.
Цифровые модели рельефа (ЦМР / DTM)
LiDAR также часто стали использовать для создания цифровых моделей рельефа (DTM). И опять же, практика показала, что этот метод более эффективен по сравнению с фотограмметрией.
Почему? Главной причиной можно назвать тот факт, что LiDAR способен проникать сквозь густую растительность и определять особенности земной поверхности даже под густыми слоями растительности. Напротив, с помощью фотограмметрии было бы крайне сложно выполнить эту задачу, так как растительность выступает в качестве препятствия.
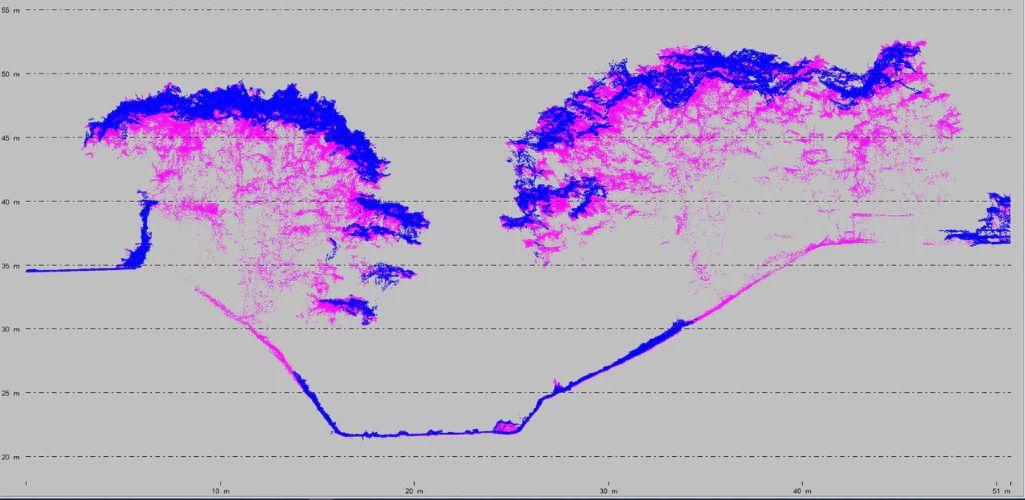
Это хорошо показано на изображении ниже, где можно наглядно понять разницу между расширенными возможностями LiDAR проникать сквозь крону деревьев (области розового цвета) по сравнению с методом фотограмметрии (области синего цвета).
Цифровые модели рельефа являются основой для создания подробных и точных топографических карт, предоставляющих важную информацию о перепадах высот точно отображающих в двухмерном формате земную поверхность.
DTM можно использовать для различных задач:
- оценка риска наводнений,
- управление природными ресурсами,
- точное земледелие,
- оценка воздействия на окружающую среду,
- борьба со стихийными бедствиями,
- моделирование среды обитания диких животных.
В чем же разница в результатах работы L2 и L1 при создании DTM? В целом LiDAR всегда позволял и позволяет создавать цифровые модели рельефа более высокого качества. Это связано с тем, что при растеризации облака точек для создания модели уменьшается количество пробелом в данных. Но цифровая модель рельефа, созданная с помощью L2, оказывается гораздо более полной, с меньшим количеством областей, где отсутствуют данные для формирования структуры поверхности.
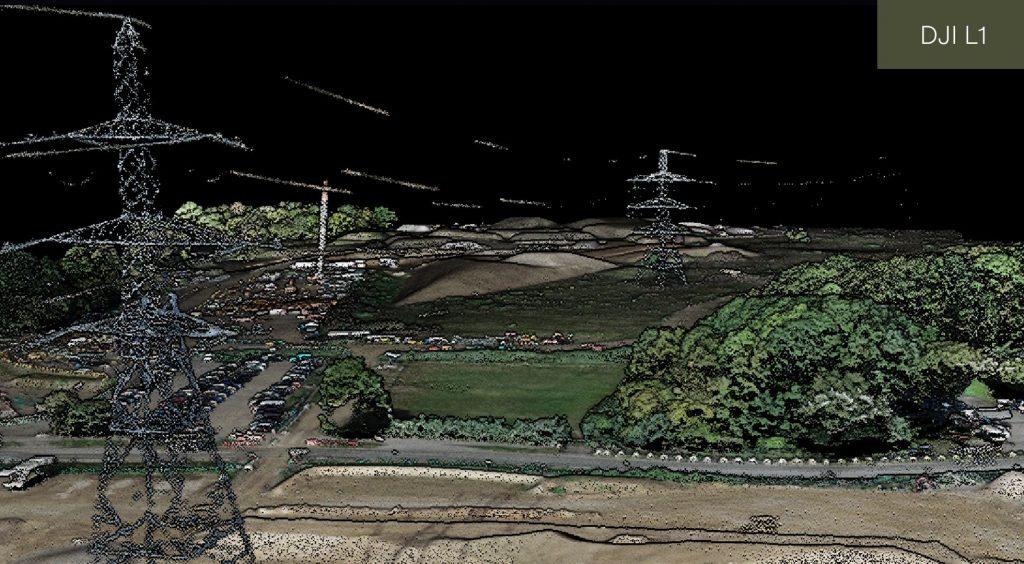
На изображении ниже показано, что L2 создал более основательную и цельную поверхность земли по сравнению с результатами с L1.
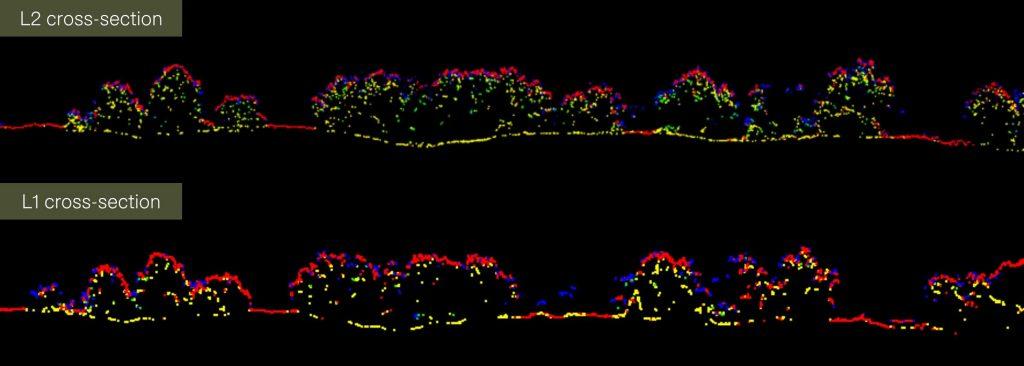
Этому способствует повышенная скорость сбора данных L2 и уровни возврата. Отображающиеся вертикальные сечения выше показывают данные возврата импульса. На изображениях ниже показана траектория полета над растительностью. Кроме того, обратите внимание, что линии электропередачи более полны на виде L2 по сравнению с L1.

Результаты другого тестирования смотрите в следующей статье.
Добавить комментарий