Введение в технологии RTK, PPK и Cloud PPK
В геодезии и картографии воздушная съемка используется довольно давно и достаточно широко. Однако появление беспилотных технологий позволило повысить не только точность и эффективность, но и доступность съемки. При этом следует понимать, что беспилотные решения все же обладают собственной спецификой, а операторам и команде специалистов на земле нужно учитывать ряд факторов, чтобы выбрать оптимальное решение для выполнения работ. В зависимости от точности результатов, требуемых для миссии, а также временных ограничений, пользователи могут повысить точность определения местоположения, полагаясь на наземные контрольные точки (GCP) и беспилотник без RTK или решение, состоящее из дрона с поддержкой RTK и позволяющее выполнить в реальном времени процесс постобработки и исправлений.
Технологии, повышающие точность позиционирования
Кинематика в реальном времени (RTK)
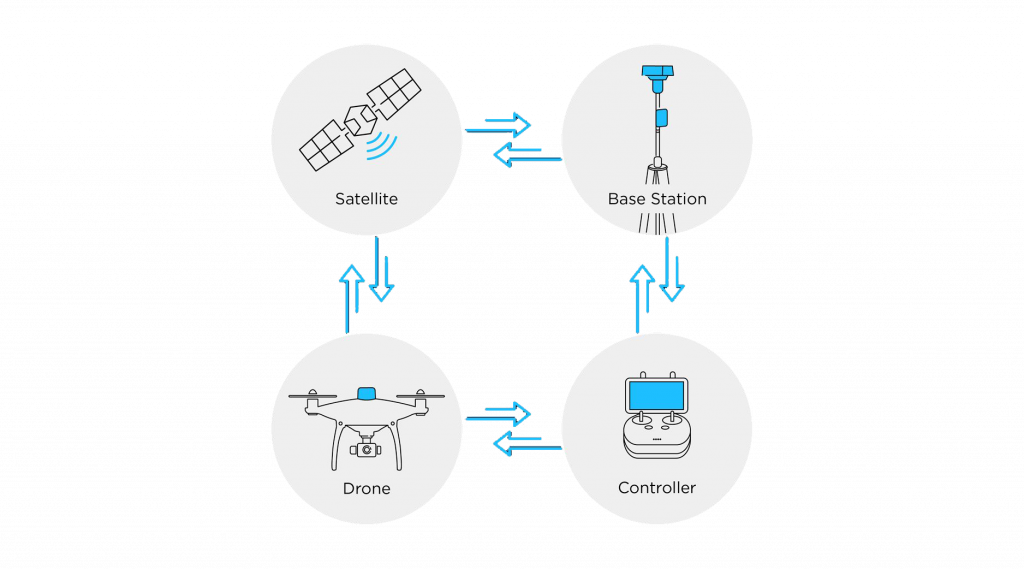
Пояснения к схеме:
Satellite – спутник,
Base Station – базовая станция,
Drone – квадрокоптер DJI Phantom 4 RTK.
Controller – пульт дистанционного управления
Кинематика в реальном времени (RTK) представляет собой усовершенствованную технологию спутникового позиционирования, которая включает наземную станцию с известным местоположением в качестве вспомогательной точки отсчета положения, чтобы предоставить более точные данные. Когда система RTK установлена на дроне, она используется для объединения и сопоставления данных о местоположении, полученных с виртуальных и физических базовых станций, с корректировкой местоположения камеры дрона в режиме реального времени. При правильном развертывании беспилотники могут создавать точные данные о местоположении на сантиметровом уровне точности, которые в полете встраиваются в аэрофотоснимки.
Беспилотные решения RTK особенно востребованы, поскольку они обеспечивают результаты в режиме реального времени. Но для качественного выполнения задач необходима постоянная и хорошая связь на протяжении всей полетной миссии. Между тем, специалистам нередко приходится работать в таких условиях, где стабильная передача данных затруднена.
В полете RTK требуется два типа каналов передачи данных: один между пультом дистанционного управления и базовой станцией RTK, а другой между пультом дистанционного управления и дроном. Линия связи между пультом может столкнуться с нестабильностью во время сетевого подключения, в то время как связь между пультом управления и беспилотником может зависеть от препятствий и помех в районе полетов. Поэтому, чтобы снизить риск потери связи на каналах передачи данных, хорошей альтернативой для геодезических исследований может стать технология PPK, особенно если вы планируете выполнять работы в отдаленных районах с плохим качеством связи в сети или наличием таких препятствий, как деревья, здания или металлические конструкции.
Технология PPK
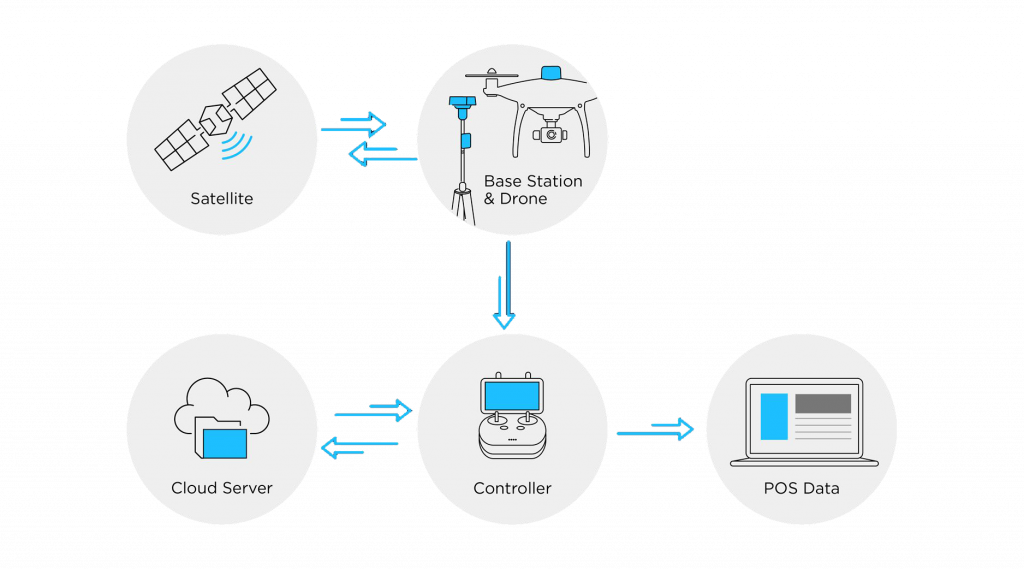
Пояснения к схеме:
Satellite – спутник,
Base Station & Drone – базовая станция и квадрокоптер DJI Phantom 4 RTK.
Cloud Server – облачный сервер
Controller – пульт дистанционного управления
POS data – данные POS
PPK позволяет скорректировать данные не во время полета, а сразу после него. Сами данные обычно хранятся на борту беспилотного летательного аппарата. После завершения полета специалисты объединяют эти данные с данными базовой станции, получая в специальном программном обеспечении, установленном на ПК. Это дает пользователям больше гибкости и надежности: например, если в полете возникают проблемы на линии передачи данных в реальном времени, точность результатов все равно можно поддерживать, так как расчеты включают данные PPK. Место взлета не обязательно должно быть идеальным, и расстояние от базовой станции может быть больше.
Новый облачный сервис PPK (Cloud PPK) для DJI Phantom 4 RTK выводит эффективность на новый уровень за счет того, что вычислительные операции выполняются прямо в пульте пульте дистанционного управления. Это стало возможным после появления дополнительной опции в приложении планирования полетов DJI GS RTK. Такое решение позволяет отказаться от использования отдельного приложения на стационарном компьютере или ноутбуке. Данные, собранные с любой базовой станции DJI базовой станции RINEX, можно быстро обработать в приложении, что оптимизирует рабочие процессы без ущерба для точности данных. Полученные данные POS могут быть легко импортированы в DJI Terra для дальнейшей обработки.
Различия между технологиями RTK, PPK и облачным PPK:
| Дрон + RTK | Дрон + RTK + PPK | Дрон + RTK + Cloud PPK | |
| Точность позиционирования | Сантиметрового уровня | Сантиметрового уровня | Сантиметрового уровня |
| Требуется подключение к данным в реальном времени | Да | Нет | Нет |
| Когда и где выполняются расчеты | В реальном времени во время полета дрона | После полета в программном обеспечении PPK | После полета в приложении GS RTK на совместимом пульте управления |
| Влияние потери RTK Lock | Высокое.Качество подключения зависит от интернета или подключения к данным на месте. | Низкое | Низкое |
| Требуется базовая станция RTK | Да.Требуется подключение к базовой станции или сетевой RTK, как CORS | Да.Требуется подключение к базовой станции или сетевой RTK, как CORS | Да.Требуется подключение к базовой станции или сетевой RTK, как CORS |
Таблица наглядно показывает, что все беспилотные решения RTK и PPK способны предоставлять точные данные с сантиметровым уровнем точности. Но решения RTK требуют наличия базовой станции и особых условий для взлета и полета, чтобы можно было обработать данные в режиме реального времени. В то же время решения на основе PPK предлагают более гибкие условия. Независимо от того, где и как специалисты использовали беспилотные системы для выполнения геодезических исследований, все задачи будут выполнены, а данные будут точными и надежными.
Добавить комментарий